1.概述
閥門电动装置是工业过程自动化控制领域常用的一种机电一体化执行设备,它以电能作为动力,可以按照预先的设定要求,输出具有一定动能的角位移或直线位移(即行程控制),同时能限制输出的转矩或推力(即转矩控制),此外还可以安全地进行手动操作。閥門电动装置主要用来驱动各种介质(如水、油、气、蒸汽、灰渣等)的管道閥門或挡板,并对其进行开启、关闭或连续调节,以使流量、压力、温度等参数适应控制系统的指令要求。
由于核级产品有抗震要求,因此设计核级产品时,在满足功能要求的前提下应尽量做到使所设计的产品体积小、重量轻、重心低。而对小转矩(本文所指的小转矩範圍:对多回转电动装置,输出转矩10~100Nm;对部分回转电动装置,输出转矩50~1000Nm)核级閥門电动装置的体积和重量影响最大的就是其主传动机构,目前(核级)閥門电动装置的主传动绝大部分是采用涡轮蜗杆传动,采用涡轮蜗杆传动虽然也能实现较大的速比.但大速比下,其体积较大,结构不够紧凑,而且传动效率较低。小转矩核级閥門电动装置的主传动采用2Z-X(I)型少齿差行星齿轮传动后,可以较好地满足其体积、重量和重心要求。该传动具有以下几个主要优点:
(1)2Z-X(I)型少齒差行星傳動采用雙內齧合齒輪傳動,結構緊湊;
(2)傳動效率較高;
(3)加工方便,成本較低(內、外齒可用普通插齒機加工);
(4)由于傳動時可以産生多對齒面齧合,承載能力大;
(5)運轉平穩可靠、噪音小、壽命長。
2.參數選擇與設計計算
图1是扬州电力设备修造厂专门为田湾核电站开发的用于逐步替代进口原供电动装置的小转矩SDZH核级閥門电动装置。该电动装置主要技术参数与指标如下:
電源:三相380VAC±10%,50Hz
電機工作制式:S2,15min
防護等級:IP67
環境條件:環境溫度-20℃~+60℃;常溫常壓下,相對濕度<95%
技術指標:轉矩重複精度爲:≤±lO%;行程重複精度爲:≤±5°
開關與控制信號裝置:力矩開關(一常開、一常閉)、行程開關(兩常開、兩常閉)
核安全等級:K2/K3
總重量:≤20Kg
控制轉矩範圍:5~15Nm、10~30Nm、20~50Nm
輸出轉速:10rpm;輸出軸最大轉圈數:l0圈
電氣及機械接口與進口原供電動裝置相同。
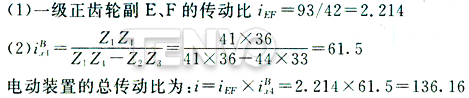
由于是替代項目,該電動裝置的體積和重量受到了進口原供電動裝置的限制,主傳動采用了2Z-X(T)型少齒差行星齒輪傳動後(其傳動簡圖見圖2),電動裝置結構緊湊。滿足了體積和重量等方面的替代要求。
本文主要从传动比和效率计算以及加工误差对齿轮齿廓重迭干涉影响的角度讨论2Z—X(I)型少齿差行星齿轮传动在小转矩多回转核级閥門电动装置上的应用。
2.1 主传动的构成及参数选择
2.1.1 主传动的构成:由一对正齿轮和一个2z—x(I)型少齿差行星传动减速机构构成。
2.1.2齒輪參數選擇
(1)一級正齒輪副E、F。模數取m一1.齒數分別取爲:ZE—42,ZF—93。
(2)2z—x(I)型少齒差行星減速齒輪模數及齒數等參數的確定。
按文獻(1)第14篇第6章的相關內容進行少齒差行星齒輪的參數選擇,參數見表1,注:內齧合齒輪副內齒輪齒數與外齒輪齒數之Zd=Z2-Z1=Z4-Z3乙稱爲齒數差。一般齒數差Zd=1~8稱爲少齒差。
| 項目 | 外齒1 | 外齒2 | 外齒3 | 外齒4 |
| 齒數Z | 41 | 44 | 33 | 36 |
| 變位系數x | 0.0587 | 0.1795 | 0.0558 | 0.1766 |
| 齒數差Zd | 3 | 3 | ||
| 設計中心距a′ | 1.6 | 1.6 | ||
| 模數m | 1 | |||
| 齒頂高系數h*a | 0.6 | |||
| 壓力角a | 20° | |||
| 齧合角a′ | 28.241° | |||
2.2 传动比的計算
2.3 传动效率的計算
行星齒輪傳動的效率是評價其傳動性能優劣的重要指標之一。試驗研究和理淪分析發現行星傳動的效率有如下特點:
(1)行星齒輪傳動的效率,隨其結構類型的不同而不同;
(2)同一型式的行星齒輪傳動的效率,隨傳動比的變化而變化;
(3)同一型式的行星齒輪傳動,當主、從動件改變時,效率隨之改變;
(4)行星齒輪傳動的效率的變化範圍很大,高的達O.98以上。低的可接近于零,甚至自鎖。
SDZH核级閥門电动装置的主传比为136.16。其中2z—x(I)型少齿差行星传动部分的传动比为61.5,其主动件为偏心转臂(x),输出件为内齿输出轴(内齿轮4),固定件为内齿轮2(见图2)。该行星传动的效率计算如下:
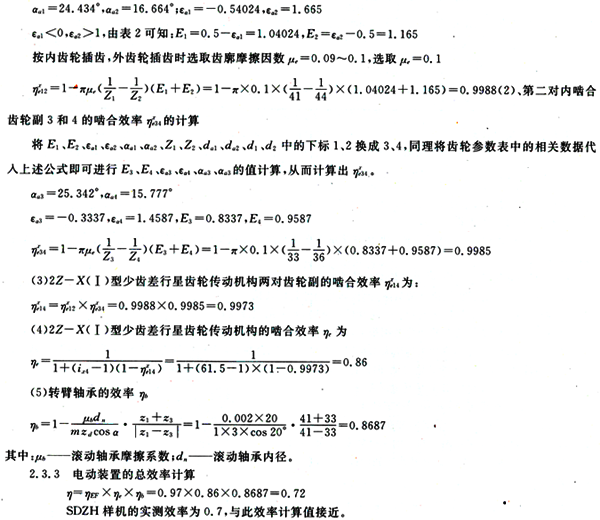
2.3.1 一级正齿轮副E、F的传动效率ηEF
直接選取ηEF=0.97
2.3.2 2Z—X(I)型少齿差行星齿轮传动效率计算
(1)第一對內齧合齒輪副1和2的齧合效率講ηre12的計算
本文主要以内啮合齿轮副I(外齿l和内齿2)为例说明,内啮合齿轮副Ⅱ(外齒3和内齿4)类同,仅加以必要的说明。

| 項目 | 範圍 | E1 | E2 |
| εa1或εa1 | ≥0且≤1 | 0.5-εa1+ε2a1 | 0.5-εa2+ε2a2 |
| >1 | εa1-0.5 | εa2-0.5 | |
| <0 | 0.5-εa1 | 0.5-εa2 | |
| 齒廓摩擦因數μe | 內齒輪插齒,外齒輪磨齒或剃齒 | 約0.07~0.08 | |
| 內齒輪插齒,外齒輪滾齒或插齒 | 約0.09~0.1 | ||
將齒輪參數表中的相關數據代入上述公式計算可得:
2.4 齿廓重迭干涉计算(Gs)
2Z–x(I)型少齒差行星齒輪傳動的兩對內齧合齒輪副必須分別滿足各自的齒廓重叠幹涉條件才能避免傳動時發生齒廓重叠幹涉,內齧合齒輪副不産生幹涉的條件是必須確保Gs12>0與Gs34>0,設計時一般取Gs>O.05。對于內齒輪副I,其齒廓重叠幹涉條件Gs12的表達式爲:


只要將上式中的下標1和2分別置換成3和4,即可得到內齒輪副Ⅱ的Gs34的表達式。
2.4.1 不考虑齿轮加工误差对齿廓重迭干涉验算值Gs12、Gs34的影響
將齒輪的相關數據代入上述公式計算可得:

由齒廓重叠幹涉驗算值Gs12、Gs34的計算结果可知,该少齿差内啮合齿轮传动,在不考虑加工误差的影響时,不会产生齿廓重迭干涉。
2.4.2 分析加工误差对齿廓重迭干涉验算值Gs12、Gs34的影響
實際應用中,由于零件加工誤差的存在,齒輪齧合時往往還是會出現輕微的幹涉現象,使電動裝置的噪音增大,效率下降。對齒廓重叠幹涉産生影響的工誤差主要有:齒輪的齒圈徑向跳動、齒輪傳動的中心距極限偏差(偏心轉臂的偏心距)、齒輪的齒頂圓偏差以及轉臂軸承遊隙等。
下面就以齿圈径向跳动为例来分析齿轮的加工误差对齿廓重迭干涉的影響,四个齿轮均采用8级精度,其径向跳动均为Fr=0.045。這個誤差將影響到內齧合齒輪副的實際傳動中心距。假設實際傳動時的中心距爲α″=α′±Fr。

實際傳動時的中心距α″愈大,則齧合角愈大,愈不易産生齒廓重叠幹涉。故只要驗證實際中心距α″=α′-F,時的狀態是否幹涉即可,假設齒輪的實際徑向跳動偏Fr≤0.045。
由以上计算可知,由于齿圈径向跳动偏差的存在,就可能使原本不干涉的少齿差内啮合齿轮产生齿廓重迭干涉。所以,为了确保少齿差内啮合齿轮的传动质量,必须采取措施消除齿圈径向跳动偏差对齿廓重迭干涉的影響。另外,对齿廓重迭干涉影响较大的加工误差还有中心距极限偏差和齿顶圆直径偏差。在通常的齿轮传动设计中,中心距极限偏差一般按设计手册取正负偏差值,由于中心距取负偏差时,实际中心距减小了,往往导致Gs變小,易産生齒廓重叠幹涉;反之,中心距取正偏差時,使Gs變大,不易産生幹涉。所以對少齒差內齧合齒輪傳動來講應該采用正的中心距偏差。同理,齒頂圓直徑偏差對內齒輪來說應取正偏差,對外齒輪來說應取負偏差相當于齒頂高進一步縮短,可使Gs變大,不易産生齒廓重叠幹涉。
所以2Z—X(I)型少齿差行星齿轮传动可以采用中心距(甚至可以把齿圈径向跳动的影響直接加到中心距上,即取中心距α″=α′+Fr)正偏差以及适当加大齿顶圆直径偏差(内齿轮取正偏差,外齿轮取负偏差)的办法来弥补加工误差对齿廓重迭干涉的影響。
3.結語
由于2z—x(I)型少齿差行星齿轮传动具有承载能力强、速比大、效率高等优点,从而使所设计的sDzH核级閥門电动装置结构紧凑,体积小、重量轻,重心低,很好地满足核级产品的抗震要求。只要在少齿差行星齿轮传动的设计中,充分考虑到加工误差因素对齿廓重迭干涉的不同影响,从而在设计上采取相应的补偿措施,就能设计出理想的小转矩核级閥門电动装置或与其配套的少齿差行星减速器。
sDzH核级閥門电动装置在外壳采用球铁铸件的情况下,其整机实际重量仅为19.4kg,比进口原供电动装置(外壳为铝合金)略有增加,经抗震分析计算及实际的抗震试验表明,在与閥門连接的机械接口不变情况下,sDzH核级閥門电动装置完全能满足标准规定的抗震鉴定要求。它的体积比进口原供电动装置要小,完全满足了替代的安装尺寸要求。
2008年4月,SDzH核级閥門电动装置通过了由中国机械工业联合会主持的科学技术成果鉴定。由来自国家环境保护部核安全中心、中国核电工程有限公司、中国核动力研究设计院、上海核工程研究设计院、中科华核电技术研究院、清华大学核能与新能源技术研究院等核领域单位的专家组成的鉴定委员会一致认为,sDzH核级閥門电动装置性能可靠,在国内居领先水平,达到了国际同类产品水平。
SDzH核级閥門电动装置的成功开发不仅解决了二代加CPRl000堆型上大量小口径截止閥、隔膜閥用电动装置的自主化配套问题,同时还有力推动了田湾核电站“物项替代”进口原供閥門电动装置的国产化进程。目前,已有多台小转矩sDZH核级閥門电动装置在田湾核电站安装运行,并且运行良好。
上海蝶閥-天沃,與您資料共享!




















